
Focussing on noise test refinements of the circuits and chip components design, reporting developments on multiple visual systems and multiple modality computation systems coordination, integration and realisation, relevant to WP1, WP3 and WP4.
The ULTRACEPT Workshop 4 was hosted by ULTRACEPT partner Universitat of Hamburg (UHAM). It took place over two days on the 25th and 26th October 2021. Due to ongoing travel restrictions, the workshop was hosted online. 36 researchers attended the session.

Details of the agenda are set out below.
| Day 1
Date: Monday, 25 October 2021 Time: Germany 11:00; UK 10:00; China 17:00; Buenos Aires 06:00; Malaysia 17:00; Japan 18:00 Facilitator: Prof Jianwei Zhang |
||
| German time | Item | Lead |
| 11:00-11:05 | Arrival and welcome | Prof Jianwei Zhang |
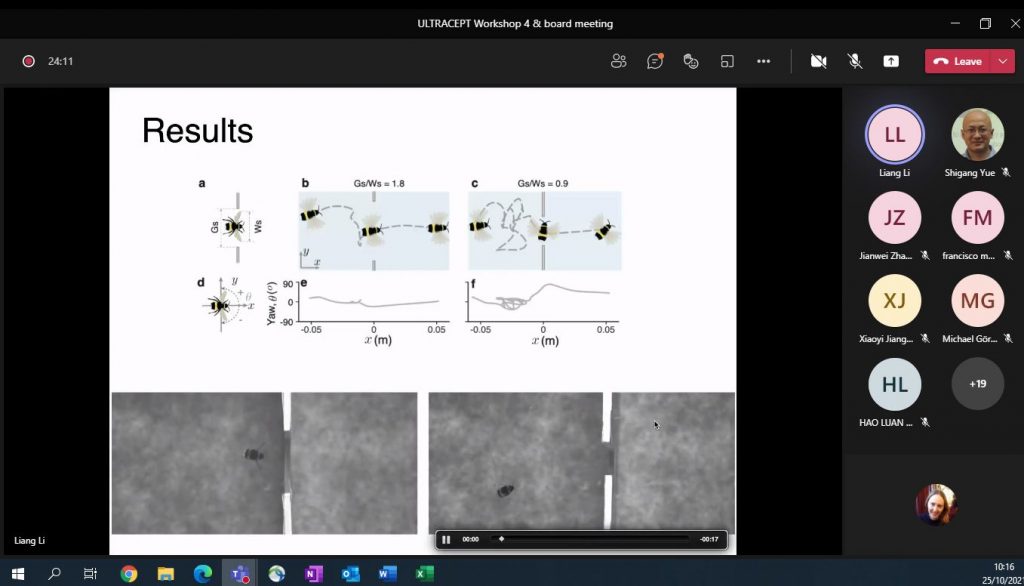
| 11:05-12:05 | Bio-inspiration and bio-understanding in collision avoidance
Dr. Liang Li, Max Planck Institute of Animal Behaviour. 45 minutes presentation & 15 minutes Q&A Abstract: Animals that move within groups or through complex habitats must frequently contend with obstacles in their path. However, what variables animals perceive through onboard sensors and how the perceived information is processed for motor control are largely unexplored. To solve this, we need inter-disciplinary studies between biology and robotics, including applying biological mechanisms in robotics and using robots to study biology. In this talk, I will first introduce bio-inspired formation control in collective fish-like robots to avoid collisions. Following this, I will report how bumblebees avoid environmental obstacles and navigate through narrow gaps. The mechanisms of visual-motor control can greatly inspire engineers to build intelligent robots to avoid collisions in complex environments. And then, I will report several ongoing studies of using real and virtual robots to study how the robots can help us understand the leader-follower behavior without collisions. Finally, I would like to report how the robots can generate biological hypotheses of sensory-motor control in schooling fish. Over this talk, I would like to highlight that applying robotics to study biology is as important as researches of bio-inspiration because it can help us generate hypotheses, explore potential mechanisms, and verify sensory-motor control in biological systems. Once we have a clear understanding of the mechanisms in living organisms, we can easily apply them to robotics.
Dr Liang Li, Max Planck Institute of Animal Behaviour & University of Konstanz. Liang Li received B.E. degree in automation from Chongqing University, China in 2011, and the PhD degree in general mechanics and foundation of mechanics from Peking University, China in 2017. From February 2017 to June 2021, he was a Postdoctoral Research Fellow in the Department of Collective Behaviour, Max Planck Institute of Animal Behavior, Konstanz, Germany. He is currently a Project Leader (Principal Investigator) with the Department of Collective Behaviour, Max Planck Institute of Animal Behavior, Konstanz, Germany. His research interests include bio-inspired robots, collective behaviour in hybrid animal-robot systems, bio-fluid dynamics in fish school, and swarm intelligence in robots. |
Dr Liang Li |
| 12:05-12:30 | Break | |
| 12:30-13:30 | Multisensor based vehicle collision avoidance – algorithms, hardware design and applications
Prof. Ming Li, Wuhan University / In-Driving. 45 minutes presentation & 15 minutes Q&A Prof. Li, is currently an associate professor in the Department of Computer Science of Wuhan University. He got his Phd degree in photogrammetry and remote sensing from Wuhan University in 2007. From 2011 to 2012, he studied environmental modeling of unmanned systems at Jacobi University in Germany, jointly supported by German DAAD and China CSC as a visiting scholar. In 2013, he received funding from China CSC and continued his work in developing unmanned vehicle systems in Karlsruher Institut für Technologie in Germany. He is engaged in the research of unmanned driving environment perception technology, organized the development of multi generation unmanned intelligent vehicle platforms. The first generation of unmanned vehicles SmartV II from his team won first place in the comprehensive test and second place in the total score in the “Future Challenge” competition. The second-generation unmanned vehicle uses VeloSLAM to realize autonomous driving in a complex urban environment, for example, the complex Luxiang roundabout in Wuhan. The third-generation unmanned vehicle from his team is jointly developed with Dongfeng Technology Center. It has reached the mass production prototype test standard of the car factory and was reported as the first autonomous driving vehicle of Dongfeng by Hubei TV. |
Prof Ming Li |
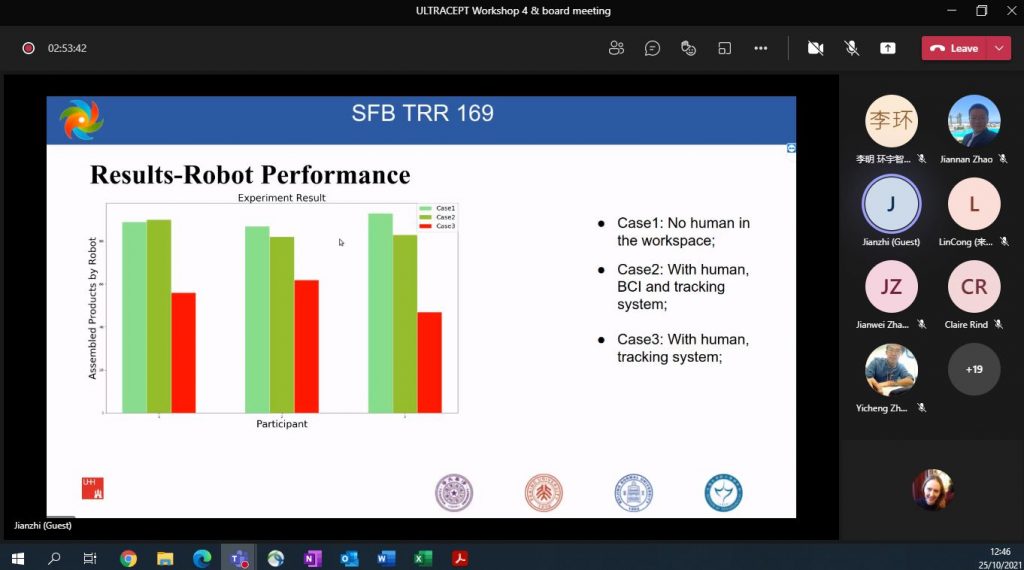
| 13:30-14:00 | BCI Technology for Human-robot Collaboration
Jianzhi Lyu, PhD student in computer science, Universitat of Hamburg 20 minutes presentation & 10 minutes Q&A Abstract: To avoid collisions and make collaboration in a shared workspace safe, robots need to detect the human’s movement intention as early as possible, thus allowing for the time needed to replan and execute the robot’s trajectory. In this paper, we present a setup for studying how information recorded from a motion-tracking system and the electroencephalogram (EEG)of the human brain can be exploited for dynamically adjusting the robot’s trajectories. In particular, we employ a brain-computer interface (BCI) to detect the target of the human’s overt attention and develop a controller which minimizes interference with the human’s action yet maximizes performance in the robot’s task. Moreover, EEG data are used to evaluate the operator’s vigilance and adapt parameters of the robot movements accordingly. |
Jianzhi Lyu |
| 14:00-14:05 | Day 1 close | Prof Jianwei Zhang |
| Day 2
Date: Tuesday, 26 October 2021 Time: Germany 11:00; UK 10:00; China 17:00; Buenos Aires 06:00; Malaysia 17:00; Japan 18:00 Facilitator: Prof Jianwei Zhang |
||
| 11:00 to 13:00: ULTRACEPT board meeting – only members and representatives to attend this meeting. Guests may join for the guest speaker at 13:30. | ||
| German time | Item | Lead |
| 11:00-13:00 | Board meeting | |
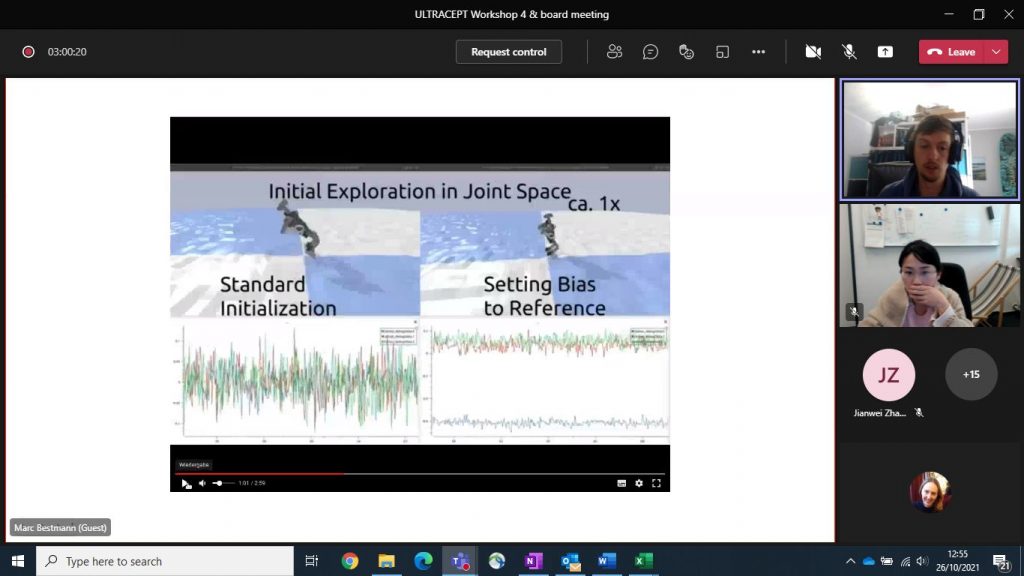
| 13:30-14:00 | Omnidirectional Bipedal Walking in Cartesian Space through Reinforcement Learning and Optimized Quintic Splines
Marc Bestmann, PhD student in computer science, Universitat of Hamburg 20 minutes presentation & 10 minutes Q&A Abstract: This presentation investigates design choices for reinforcement learning in the domain of bipedal walking. We demonstrate that an omnidirectional walk for a humanoid robot can be achieved by using a walk engine to generate reference actions. The used walk engine is based on parameterized quintic splines that are optimized with the Multi-objective Tree-structured Parzen Estimator (MOTPE). We show that using Cartesian policies improves the achieved reward in comparison to joint space based policies. Furthermore, it is demonstrated that the achieved reward is proportional to the reference motions quality. The learned policy is transferred to a different simulation and the real robot. |
Marc Bestmann |
| 14:00-14:10 | Workshop event close | Prof Jianwei Zhang |
The workshop was formally opened by UHAM ULTRACEPT lead Prof Jianwei Zhang. Following this was a presentation from guest speaker Dr Liang Li from the Max Planck Institute of Animal Behaviour on Bio-inspiration and bio-understanding in collision avoidance.
Following this was a presentation from guest speaker Prof. Ming Li, Wuhan University / In-Driving. He presented on Multisensor based vehicle collision avoidance – algorithms, hardware design and applications.
The final presentation for day 2 of the ULTRACEPT workshop was from UHAM PhD student Jianzhi Lyu. Jianzhi presented BCI Technology for Human-robot Collaboration.
Day 2 of the workshop begun with an ULTRACEPT board meeting. This was followed by a presentation from UHAM PhD student Marc Bestmann who presented his work on Omnidirectional Bipedal Walking in Cartesian Space through Reinforcement Learning and Optimized Quintic Splines.