Yunlei Shi is a 4th year full-time Ph.D. student at the Universität Hamburg and working at project partner Agile Robots. In 2020 he was seconded to Tsinghua University as part of the STEP2DYNA project. His work continues in the ULTRACEPT project where he contributes to Work Package 4.
Yunlei Shi attended the 2021 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 20/21) which was held 27th to the 31st December 2021 at the Four Points by Sheraton Hainan, Sanya, China. The conference was held both in person and online. Yunlei was grateful for the opportunity to attend this fantastic conference with support from ULTRACEPT.
The theme of ROBIO 20-21 was “Robotics and Biomimetics to meet societal grand challenges” reflecting the fast-growing and timely interests in research, development and applications and their impacts on the world. Due to the COVID-19 pandemic, ROBIO 2020 and 2021 were combined and held jointly. ROBIO 20-21 The conference highlighted the research results, new engineering development, and applications related to meeting the societal grand challenges such as COVID-19 pandemic.
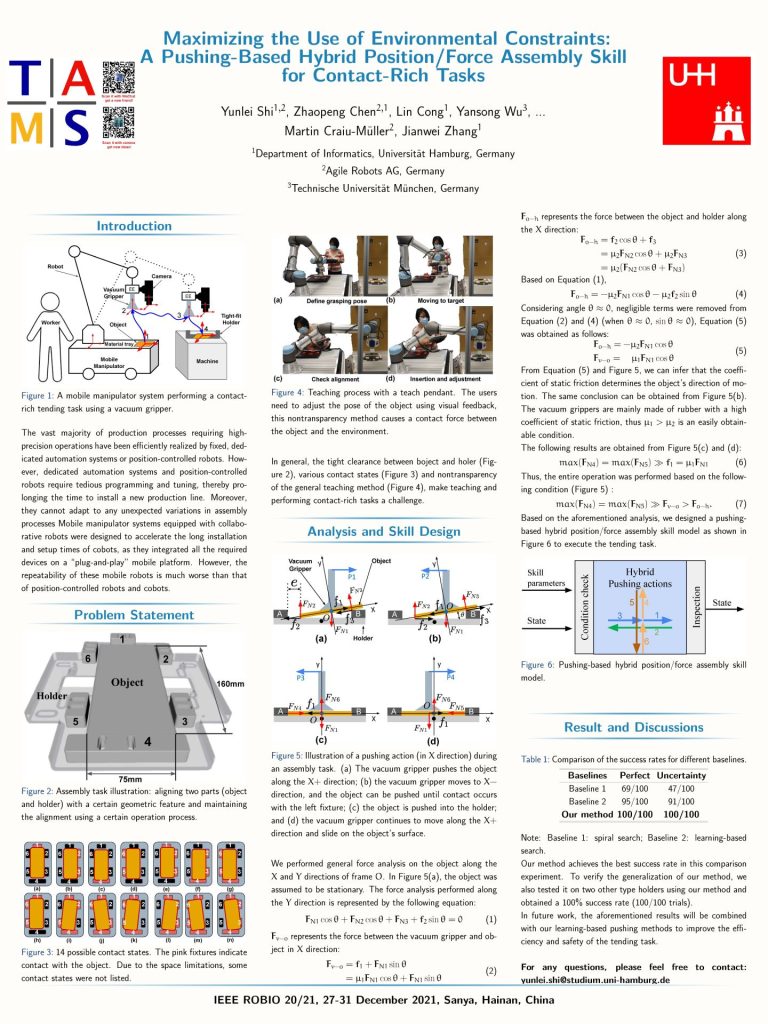
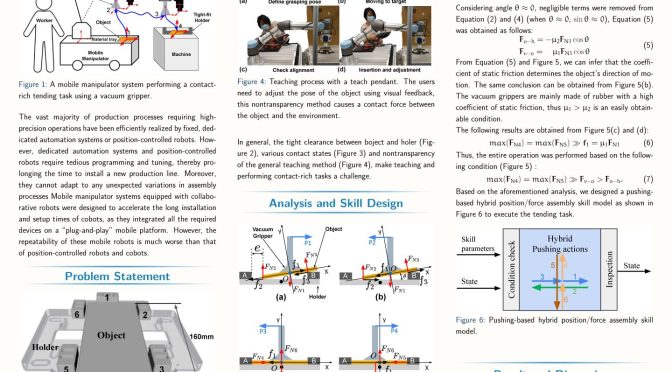
Yunlei represented Agile Robots, Universität Hamburg, and the ULTRACEPT project by presenting his conference poster Yunlei Shi, Zhaopeng Chen, Lin Cong, Yansong Wu, Martin Craiu-M¨uller, Chengjie Yuan, Chunyang Chang, Lei Zhang, Jianwei Zhang. Maximizing the Use of Environmental Constraints: A Pushing Based Hybrid Position/Force Assembly Skill for Contact-Rich Tasks. Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics December 27-31, 2021, Sanya, China https://10.1109/ROBIO54168.2021.9739349