Tian Liu enrolled as a PhD Scholar at the University of Lincoln in 2018. In 2018-2019 he visited Guangzhou University as part of the STEP2DYNA project funded by the European Union’s Horizon 2020 Research and Innovation Programme under the Marie Skolodowska-Curie grant agreement. During this secondment Tian Liu developed the ColCOSΦ experiment platform for social insects and swarm robotic researching. Tian investigated how multiple virtual pheromones impact on the swarm robots. More recently, Tian completed a 12 month secondment under ULTRACEPT at Guangzhou University.
Tian Liu recently completed his second 12 month secondment at project partner Guangzhou University in China as part of the ULTRACEPT project funded by the European Union’s Horizon 2020 Research and Innovation Programme under the Marie Skolodowska-Curie grant agreement. Tian visited Guangzhou from November 2019 to November 2020 and has been involved in Work Package 1 and 4.
Tian reflects on what he has achieved during his time in Guangzhou
Most social insects, such as ants, only have a tiny brain. However, they can complete very difficult and complex tasks with a large number of individuals cooperating. Examples include building a large nest or collecting food through rugged routes. They are able to do this because the pheromones act as an important communication medium.
During this 12 month secondment, I continued to focus my attention on swarm robots with multiple pheromones. I believed that it is the interaction of multiple pheromones that enables insects to perform such demanding tasks, rather than the single pheromone mechanism which is now so widely studied. I worked with ULTRACEPT researcher Xuelong Sun and Dr. Cheng Hu to develop the ColCOSΦ, which can easily implement multiple pheromone research experiments. We verified the application and evaluation of the effects of multi-pheromones in swarm robotics by implementing several case studies which simulated ants foraging and carrying out hunting and deployment tasks.
I showcased the outcomes of this research at both ICARM2019 and ICARM2020 international conferences.


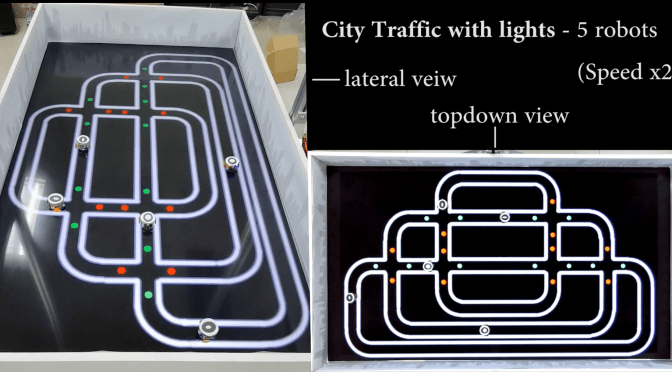
Due to its excellent scalability, we also use it for research experiments in related fields. For example, the platform can simulate traffic scenarios so we can test our LGMD model (a collision detection model) by using the micro robot (Colias) in a low-cost way.

Besides olfactory, the visual information is also a very important input for insects, so we implemented a changeable visual environment on the ColCOSΦ for investigating how to make full use of both olfactory and visual information in a swarm task. The research was collated into two articles which have been submitted to ICRA2021 with fellow ULTRACEPT researchers Xuelong Sun, Dr Qinbing Fu and Dr Cheng Hu.

The secondment has been an excellent experience for me and my colleagues and provided me the opportunity to collaborate with my project colleagues.
Many thanks to ULTRACEPT project for supporting my research and for allowing me to work with these outstanding research scholars.