Shuang Li is a fourth-year PhD student in Computer Science at Universität Hamburg. Her research interests are dexterous manipulation, vision-based teleoperation imitation learning in robotics. Shuang has been working on the project Transregio SFB “Cross-modal learning” and is involved in the ULTRACEPT Work Package 4. Shuang is the course leader of ‘Introduction to Robotics’.
Hongzhuo Liang is a fifth-year PhD student in Computer Science at Universität Hamburg. His research interests are robotic grasping manipulation based on multimodel perception. Hongzhuo has been working on the project Transregio SFB “Cross-modal learning” for STEP2DYNA (691154) and ULTRACEPT Work Package 4.
The IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) is one of the largest and most impacting robotics research conferences worldwide. Established in 1988 and held annually, IROS provides an international forum for the international robotics research community to explore the frontier of science and technology in intelligent robots and smart machines.
Researchers Shuang Li and Hongzhuo Liang from ULTRACEPT partner the Universität of Hamburg, attended and presented at IROS 2020. In addition to technical sessions and multi-media presentations, the IROS conference also held panel discussions, forums, workshops, tutorials, exhibits, and technical tours to enrich the fruitful discussions among conference attendees.
Due to COVID-19, the conference was hosted online with free access to every Technical Talk, Plenary, and Keynote and over sixty Workshops, Tutorials and Competitions. This went online on 24th October 2020 and was available until 24th January 2021.
A Mobile Robot Hand-Arm Teleoperation System by Vision and IMU
Shuang Li presenting ‘A Moble Robot Hand-Arm Teleoperation System by Vision and IMU
At IROS 2020, Shuang Li presented her conference paper:
In this paper, we present a multimodal mobile teleoperation system that consists of a novel vision-based hand pose regression network (Transteleop) and an IMU (inertial measurement units) based arm tracking method. Transteleop observes the human hand through a low-cost depth camera and generates not only joint angles but also depth images of paired robot hand poses through an image-to-image translation process. A key-point based reconstruction loss explores the resemblance in appearance and anatomy between human and robotic hands and enriches the local features of reconstructed images. A wearable camera holder enables simultaneous hand-arm control and facilitates the mobility of the whole teleoperation system. Network evaluation results on a test dataset and a variety of complex manipulation tasks that go beyond simple pick-and-place operations show the efficiency and stability of our multimodal teleoperation system.
Hongzhuo Liang presenting Robust Robust Robotic Pouring using Audition and Haptics
At IROS 2020, Hongzhuo Liang presented his conference paper:
H. Liang et al., “Robust Robotic Pouring using Audition and Haptics,” 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 2020, pp. 10880-10887, doi: 10.1109/IROS45743.2020.9340859.
Robust and accurate estimation of liquid height lies as an essential part of pouring tasks for service robots. However, vision-based methods often fail in occluded conditions, while audio-based methods cannot work well in a noisy environment. We instead propose a multimodal pouring network (MP-Net) that is able to robustly predict liquid height by conditioning on both audition and haptics input. MP-Net is trained on a self-collected multimodal pouring dataset. This dataset contains 300 robot pouring recordings with audio and force/torque measurements for three types of target containers. We also augment the audio data by inserting robot noise. We evaluated MP-Net on our collected dataset and a wide variety of robot experiments. Both network training results and robot experiments demonstrate that MP-Net is robust against noise and changes to the task and environment. Moreover, we further combine the predicted height and force data to estimate the shape of the target container.
Yannick Jonetzko is a PhD candidate at the Universität Hamburg working on the usage of tactile sensors in multimodal environments. In 2018 he visited the Tsinghua University as part of the STEP2DYNA project and is now involved in the ULTRACEPT project and contributing to Work Package 4.
The International Conference on Cognitive Systems and Information Processing 2020 (ICCSIP) took place on 25th – 27th December 2020 and was attended by ULTRACEPT researcher Yannick Jonetzko from project partner the Universität Hamburg. Due to the current travel restrictions, the conference was held online and Yannick’s work was presented via a pre-recorded video.
In the past few years, ICCSIP has matured into a well-established series of international conferences on cognitive information processing and related fields over the world. At their 2020 conference, over 60 researchers presented their work in multiple sessions on algorithms, applications, vision, manipulation, bioinformatics, and autonomous vehicles.
Robots are usually equipped with many different sensors that need to be integrated. While most research is focused on the integration of vision with other senses, we successfully integrate tactile and auditory sensor data from a complex robotic system. Herein, we train and evaluate a neural network for the classification of the content of eight optically identical medicine containers. To investigate the relevance of the tactile modality in classification under realistic conditions, we apply different noise levels to the audio data. Our results show significantly higher robustness to acoustic noise with the combined multimodal network than with the unimodal audio-based counterpart.
The IEEE International Conference on Advanced Robotics and Mechatronics (ICARM) 2020 was held in Shenzhen, China, and attended by three University of Lincoln’s (UoL) ULTRACEPT researchers; Dr Qinbing Fu, Xuelong Sun, and Tian Liu. These researchers completed 12 month ULTRACEPT secondments with project partner Guangzhou University (GZHU) in China.
L to R: Tian Liu, Qinbing Fu, and Xuelong Sun attend IEEE ARM 2020 Conference
The IEEE ARM Conference took place between the 18th and 21st December 2020 and is the flagship conference on bio-mechatronics and bio-robotics systems as well as neuro-robotics systems. The conference provides an international forum for researchers, educators, engineers in general areas of mechatronics, robotics, automation, and sensors to disseminate their latest research results and exchange views on the future research directions of these fields.
The UoL researchers attended to promote their publications produced as part of both the European Union’s Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie grant agreements STEP2DYNA (691154) and ULTRACEPT (778062) project.
Dr Qinbing Fu: Complementary Visual Neuronal Systems Model for Collision Sensing
Dr Qinbing Fu presented his research paper entitled “Complementary Visual Neuronal Systems Model for Collision Sensing” which was included in the conference proceedings on Monday morning. Dr Fu was also the chair of MoSHT3 Regular Session, based on the topic of Biomimetics.
Qinbing Fu presents his research at the IEEE ARM 2020 Conference
Abstract – Inspired by insects’ visual brains, this paper presents original modelling of a complementary visual neuronal systems model for real-time and robust collision sensing. Two categories of wide-field motion sensitive neurons, i.e., the lobula giant movement detectors (LGMDs) in locusts and the lobula plate tangential cells (LPTCs) in flies, have been studied, intensively. The LGMDs have specific selectivity to approaching objects in depth that threaten collision; whilst the LPTCs are only sensitive to translating objects in horizontal and vertical directions. Though each has been modelled and applied in various visual scenes including robot scenarios, little has been done on investigating their complementary functionality and selectivity when functioning together. To fill this vacancy, we introduce a hybrid model combining two LGMDs (LGMD-1 and LGMD-2) with horizontally (rightward and leftward) sensitive LPTCs (LPTC-R and LPTC-L) specialising in fast collision perception. With coordination and competition between different activated neurons, the proximity feature by frontal approaching stimuli can be largely sharpened up by suppressing translating and receding motions. The proposed method has been implemented in ground micro-mobile robots as embedded systems. The multi-robot experiments have demonstrated the effectiveness and robustness of the proposed model for frontal collision sensing, which outperforms previous single-type neuron computation methods against translating interference.
Dr Qinbing Fu presents his research at the IEEE ARM 2020 Conference
When asked about the conference experience Dr Fu said;
2020 has been a very tough year for everyone around the world. The pandemic has absolutely affected people’s lives. As an academic researcher, it has become more difficult to exchange ideas closely with other colleagues. Almost all of the academic conferences across every discipline has moved to on-line presenting. This has made it challenging to disseminate research and exchange ideas.
China was suffering from the pandemic in early 2020. However, due to its successful control of COVID-19, after June 2020 most parts of life, including work, had returned to normal. As a result, the conference was successfully held in person as originally planned, although international guests were not able to attend due to travel restrictions.
The conference attendees appreciated how well the conference was organised in Shenzhen. Personally, I very much enjoyed attending this conference. Due to travel restrictions, it was not a large conference, but every detail was considered and arranged properly. There were many enjoyable moments and I learnt alot. The plenary presentations were very high quality. Another special, memorable experience for me was the opportunity to chair a session for the first time during the conference. It was awesome!
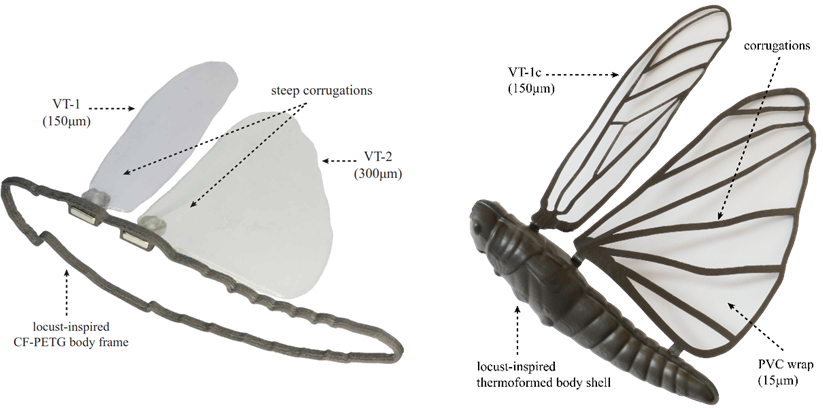
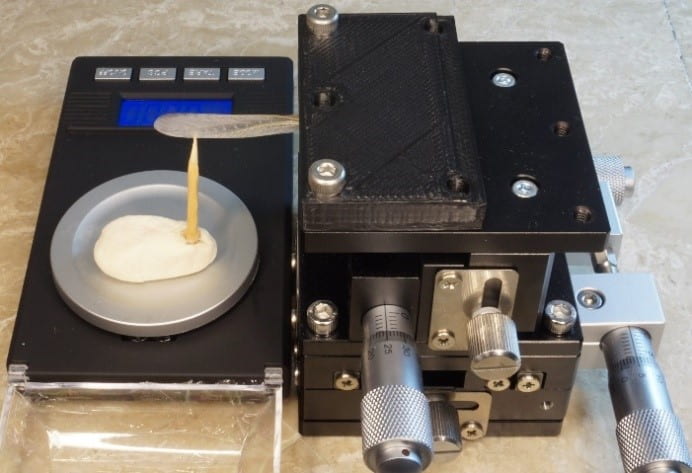
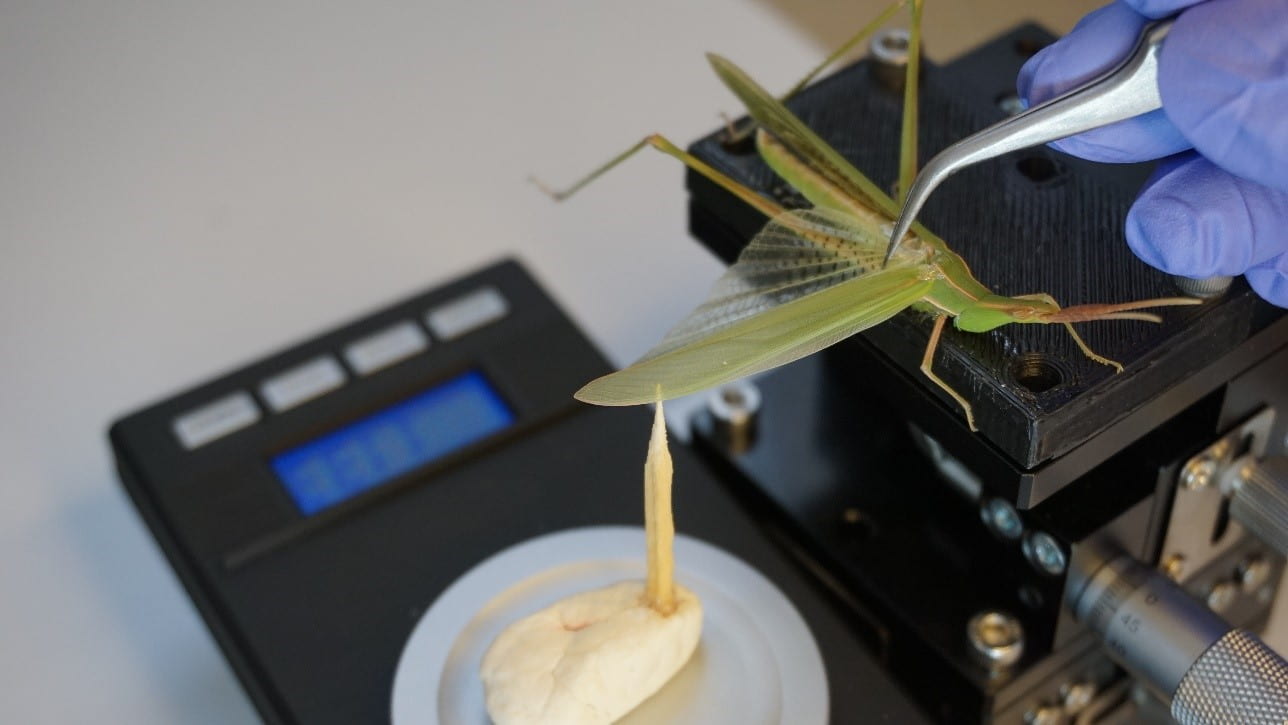
Xuelong Sun: Fabrication and Mechanical Analysis of Bioinspired Gliding-optimized Wing Prototypes for Micro Aerial Vehicles
Abstract – Gliding is the most efficient flight mode that is explicitly appreciated by natural fliers. This is achieved by high-performance structures developed over millions of years of evolution. One such prehistoric insect, locust (Schistocerca gregaria) is a perfect example of a natural glider capable of endured transatlantic flights, which could potentially inspire numerous solutions to the problems in aerospace engineering. However, biomimicry of such aerodynamic properties is hindered by the limitations of conventional as well as modern fabrication technologies in terms of precision and availability, respectively. Therefore, we explore and propose novel combinations of economical manufacturing methods to develop various locust-inspired tandem wing prototypes (i.e. fore and hindwings), for further wind tunnel based aerodynamic studies. Additionally, we determine the flexural stiffness and maximum deformation rate of our prototypes and compare it to their counterparts in nature and literature, recommending the most suitable artificial bioinspired wing for gliding micro aerial vehicle applications.
Xuelong Sun presents his research at the IEEE ARM 2020 Conference
When asked about the conference Xuelong said;
This has been a fantastic conference, although we are getting through this special year. The keynote speakers delivered very impressive talks concerning Controlling System, AI, and robotics, which offered great food for thought. I was very pleased that our paper was shortlisted for the BEST STUDENTS PAPER AWARD.
In my presentation, I reported on the work we have completed on manufactured bio-inspired wings for future flying robots which mimick locust. We emphasised that the methods applied are affordable, and that the manufactured wings feature high flexibility and rigidity. Although we didn’t win the award, we were finalist, which has encouraged us to keep moving forward with our future research.
Manufactured the bio-inspired wings for future flying robots mimicking locust
Tian Liu: Investigating Multiple Pheromones in Swarm Robots – A Case Study of Multi-Robot Deployment
Abstract – Social insects are known as the experts in handling complex task in a collective smart way although their small brains contain only limited computation resources and sensory information. It is believed that pheromones play a vital role in shaping social insects’ collective behaviours. One of the key points underlying the stigmergy is the combination of different pheromones in a specific task. In the swarm intelligence field, pheromone inspired studies usually focus one single pheromone at a time, so it is not clear how effectively multiple pheromones could be employed for a collective strategy in the real physical world. In this study, we investigate multiple pheromone-based deployment strategy for swarm robots inspired by social insects. The proposed deployment strategy uses two kinds of artificial pheromones; the attractive and the repellent pheromone that enables micro robots to be distributed in desired positions with high efficiency. The strategy is assessed systematically by both simulation and real robot experiments using a novel artificial pheromone platform ColCOSΦ. Results from the simulation and real robot experiments both demonstrate the effectiveness of the proposed strategy and reveal the role of multiple pheromones. The feasibility of the ColCOSΦ platform, and its potential for further robotic research on multiple pheromones are also verified. Our study of using different pheromones for one collective swarm robotics task may help or inspire biologists in real insects’ research.
Tian Liu presents his research at the IEEE ARM 2020 Conference
When asked about the conference Tian Lu said;
In the pandemic of COVID-19, this conference is a rare opportunity to listen to the keynote speakers presentations about control, artificial intelligence, and bioinspiration psychically. I also presented my own research about multiple pheromones and experiment system ColCOSΦ, and had a friendly exchange with scholars in related fields. I believe this conference has enabled more people to learn about our research progress and results.
Siavash Bahrami is a PhD candidate at Universiti Putra Malaysia (UPM), who is working on multimodal deep neural networks using acoustic and visual data for developing an active road safety system intended for autonomous and semi-autonomous vehicles. As part of the ULTRACEPT project working on work package 2, Siavash recently completed a 6 month secondment at the University of Lincoln and another at Visomorphic LTD.
Siavash presenting at ICIMT 2020
Recently Siavash presented a paper titled “Acoustic Feature Analysis for Wet and Dry Road Surface Classification Using Two-stream CNN” during the 12th International Conference on Information and Multimedia Technology (ICIMT 2020). The data utilised for training and testing the proposed CNN architectures were collected during Siavash’s secondment in the UK. Despite the strains caused by the global pandemic Siavash managed to complete his secondment and collect all the data that was needed for his PhD thesis and the ULTRACEPT project with the help of UoL and UPM project members.
Siavash presenting at ICIMT 2020
ICIMT 2020 was scheduled to take place between 11th and 13th December 2020 in Zhuhai, China, but due to the pandemic it was instead held as a virtual conference. The aim of ICIMT is to provide a platform for researchers, engineers, academics and industrial professionals from all over the world to present their research results and development activities in Information and Multimedia Technology. This conference provides opportunity for delegates to exchange new ideas and applications to establish business or research relations and to find global partners for future collaboration.
Professor Shigang Yue (ULTRACEPT Project Coordinator) and Associate Professor Dr. Shyamala Doraisamy (ULTRACEPT Project partner Lead for UPM) each chaired one of the conference sessions.
Siavash presentation at ICIMT 2020
Acoustic Feature Analysis for Wet and Dry Road Surface Classification Using Two-stream CNN – Abstract
Road surface wetness affects road safety and is one of the main reasons for weather-related accidents. Study on road surface classification is not only vital for future driverless vehicles but also important to the development of current vehicle active safety systems. In recent years, studies on road surface wetness classification using acoustic signals have been on the rise. Detection of road surface wetness from acoustic signals involve analysis of signal changes over time and frequency-domain caused by interaction of the tyre and the wet road surface to determine the suitable features. In this paper, two single stream CNN architectures have been investigated. The first architecture uses MFCCs and the other uses temporal and spectral features as the input for road surface wetness detection. A two-stream CNN architecture that merges the MFCCs and spectral feature sets by concatenating the outputs of the two streams is proposed for further improving classification performance of road surface wetness detection. Acoustic signals of wet and dry road surface conditions were recorded with two microphones instrumented on two different cars in a controlled environment. Experimentation and comparative performance evaluations against single stream architectures and the two-stream architecture were performed. Results shows that the accuracy performance of the proposed two-stream CNN architecture is significantly higher compared to single stream CNN for road surface wetness detection.
The team at UPM recording road soundsThe team at UPM recording road sounds
Read more about Siavash’s ULTRACEPT work in his blog post here.
Yair Barnatan is an ULTRACEPT PhD student, at the University of Buenos Aires, working in the field of neuroethology. He is currently focused on neuronal processing of optic flow in the crustacean visual system, unravelling which and how neurons are involved in this process.
This congress covered a wide variety of neuroscience topics, such as sensory and motor systems, neurodegenerative diseases and learning and memory. In that meeting, Yair presented a poster entitled “Functional evidence of the crustacean lobula plate as optic flow processing center” (Barnatan, Y., Tomsic, D. & Sztarker, J.)
Yair Barnatan from UBA attends XXXV Annual Meeting of the Argentinian Society for Neuroscience Research
Abstract
When an animal rotates it produces wide field image motion over its retina, termed optic flow (OF). OF blurs the image compromising the ability to see. Image shifts are stabilized by compensatory behaviors collectively termed optomotor response (OR). In most vertebrates and decapod crustaceans such reflex behavior involves mainly eye movements that consists in a slow tracking phase of the wide field image motion followed by a fast-resetting phase. We used the mud crab Neohelice granulata to tackle a major question in crustacean’s visual processing: which region of the brain is the neural substrate for processing OF? It has long been known that dipteran lobula plate (3rd optic neuropil) is the center involved in processing OF information. Recently, a crustacean lobula plate was characterized by neuroanatomical techniques, sharing many canonical features with the dipteran neuropil. In this work we present a functional evaluation of the role of crab’s lobula plate on the compensatory eye movements to rotational OF by performing electrolytic lesion experiments. We show that lesioning the lobula plate greatly impairs OR while keeping intact other visually guided behaviors, such as avoidance response upon an approaching stimulus. Even when OR is present in some lobula plate lesioned animals, these show reduced speed of eye tracking. Altogether, these results present strong evidence about an evolutionary conserved site for processing optic flow shared by crustacean and insects.
Huatian Wang enrolled as a PhD scholar at the University of Lincoln in January 2017. During his PhD, he carried out a 12-month secondment as an Early-Stage Researcher for the European Union’s Horizon 2020 STEP2DYNA (691154) project from 2017-18 at Tsinghua University. Following this, Huatian carried further secondments under the European Union’s Horizon 2020 ULTRACEPT (778062) project from 2019-2020. This included 1 month at Guangzhou University (GZHU), then 11 months at Xi’an Jiaotong University (XJTU). His research areas include image processing, insect vision and motion detection.
University of Lincoln researcher Huatian Wang recently published a paper titled “A bioinspired angular velocity decoding neural network model for visually guided flights” on Neural Networks. Neural Networks is the archival journal of the world’s three oldest neural modeling societies: the International Neural Network Society (INNS), the European Neural Network Society (ENNS), and the Japanese Neural Network Society (JNNS). It has a significant influence on neuroscience, especially on cognitive neuroscience.
About the Paper
Efficient and robust motion perception systems are important pre-requisites for achieving visually guided flights in future micro air vehicles. As a source of inspiration, the visual neural networks of flying insects such as honeybee and Drosophila provide ideal examples on which to base artificial motion perception models. In our paper “A bioinspired angular velocity decoding neural network model for visually guided flights”, we have used this approach to develop a novel method that solves the fundamental problem of estimating angular velocity for visually guided flights.
Compared with previous models, our elementary motion detector (EMD) based model uses a separate texture estimation pathway to effectively decode angular velocity, and demonstrates considerable independence from the spatial frequency and contrast of the gratings.
Using the Unity development platform the model is further tested for tunnel centering and terrain following paradigms in order to reproduce the visually guided flight behaviors of honeybees. In a series of controlled trials, the virtual bee utilizes the proposed angular velocity control schemes to accurately navigate through a patterned tunnel, maintaining a suitable distance from the undulating textured terrain. The results are consistent with both neuron spike recordings and behavioral path recordings of real honeybees, thereby demonstrating the model’s potential for implementation in micro air vehicles which only have visual sensors.
About the Research Experience
Huatian shares his recent research experience which contributed to this publication.
2020 was a difficult year for all of us. After a one-year secondment in China funded by the EU HORIZON 2020 project, ULTRACEPT, I had to stay in China due to the travel restriction. Thanks to the university’s policy, I could apply to work remotely at home to continue my research. My supervisor, Prof Shigang Yue, organized an online group meeting every week so that we could talk with each other freely. This benefited my study a lot and I was able to make progress every week and update my research regularly.
Publication on Neural Networks is an encouragement for me to continue my research on modeling visual systems of insects. Thanks for the support I received from the ULTRACEPT project and for the kind support from my supervisor Prof Shigang and my research colleagues.
Nikolas Andreakos is a PhD candidate at the University of Lincoln, who is working on developing computational models of associative memory formation and recognition in the mammalian hippocampus.
Recently Nikolas attended the 13th International Conference on Brain Informatics (BI2020). Due to the current travel restrictions, this year’s conference, which was scheduled to take place on 19th September 2020 in Padova, Italy, was moved online.
About Brain Informatics 2020
The Brain Informatics (BI) conference series has established itself as the world’s premier research forum on Brain Informatics, which is an emerging interdisciplinary and multidisciplinary research field with joint efforts from neuroscience, cognitive science, medicine and life sciences, data science, artificial intelligence, neuroimaging technologies, and information and communication technologies.
The 13th International Conference on Brain Informatics (BI2020) provided a premier international forum to bring together researchers and practitioners from diverse fields for presentation of original research results, as well as exchange and dissemination of innovative and practical development experiences on Brain Informatics research, brain-inspired technologies and brain/mental health applications.
The theme of BI2020 was: Brain Informatics in the Virtual World.
The BI2020 solicits high-quality original research and application papers (both full paper and abstract submissions). Relevant topics included but were not limited to:
Track 1: Cognitive and Computational Foundations of Brain Science
Track 2: Human Information Processing Systems
Track 3: Brain Big Data Analytics, Curation and Management
Track 4: Informatics Paradigms for Brain and Mental Health Research
Track 5: Brain-Machine Intelligence and Brain-Inspired Computing
Nikolas presented his research Andreakos N., Yue S., Cutsuridis V. (2020) Recall Performance Improvement in a Bio-Inspired Model of the Mammalian Hippocampus. In: Mahmud M., Vassanelli S., Kaiser M.S., Zhong N. (eds) Brain Informatics. BI 2020. Lecture Notes in Computer Science, vol 12241. Springer, Cham. https://doi.org/10.1007/978-3-030-59277-6_29.
Abstract
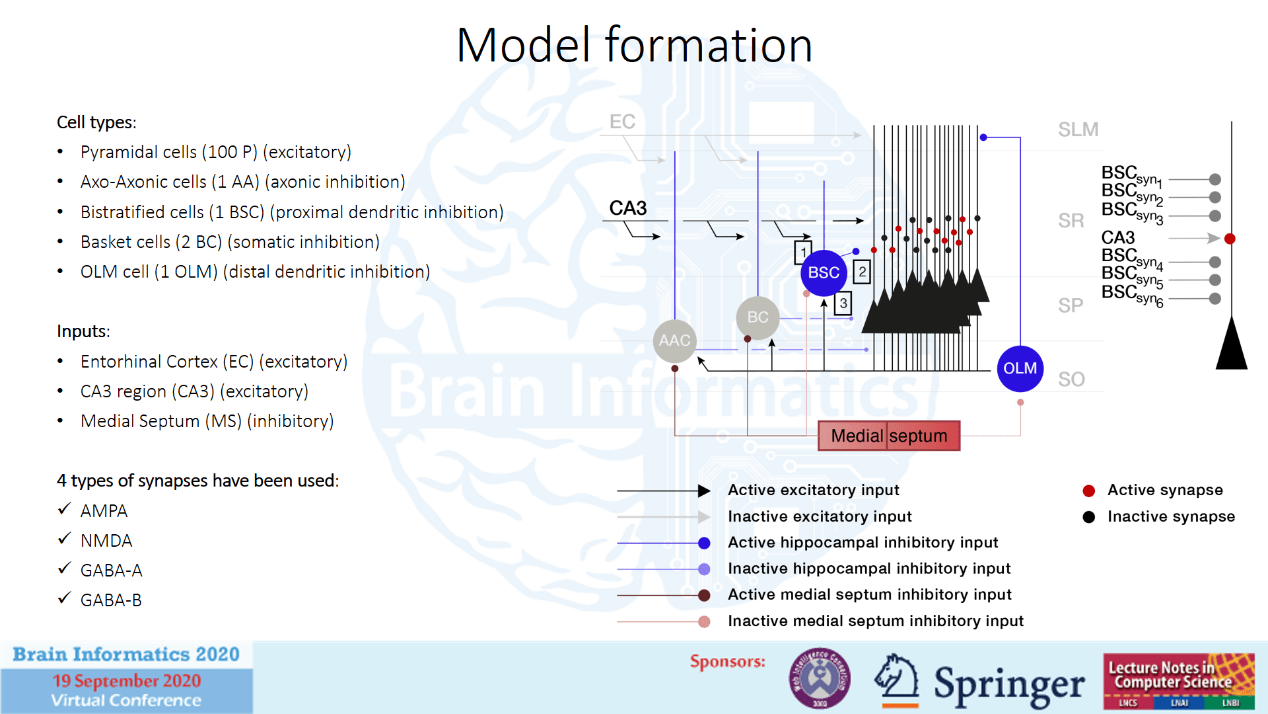
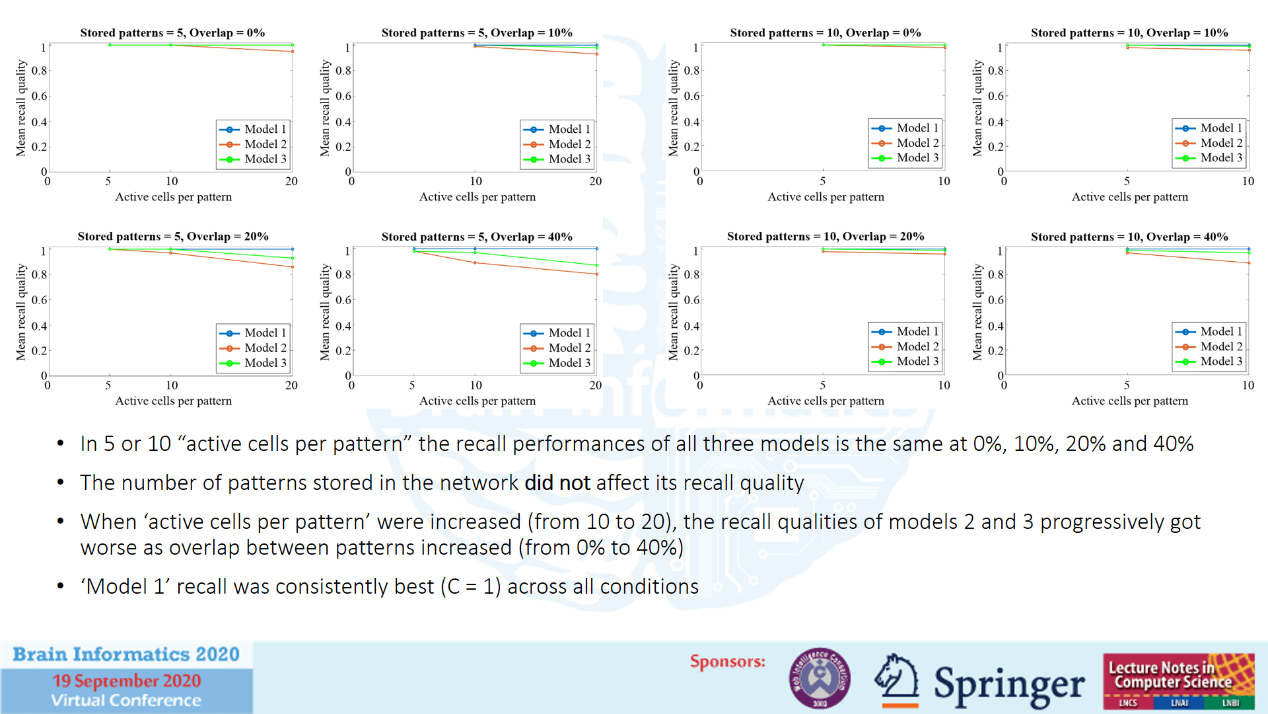
Mammalian hippocampus is involved in short-term formation of declarative memories. We employed a bio-inspired neural model of hippocampal CA1 region consisting of a zoo of excitatory and inhibitory cells. Cells’ firing was timed to a theta oscillation paced by two distinct neuronal populations exhibiting highly regular bursting activity, one tightly coupled to the trough and the other to the peak of theta. To systematically evaluate the model’s recall performance against number of stored patterns, overlaps and ‘active cells per pattern’, its cells were driven by a non-specific excitatory input to their dendrites. This excitatory input to model excitatory cells provided context and timing information for retrieval of previously stored memory patterns. Inhibition to excitatory cells’ dendrites acted as a non-specific global threshold machine that removed spurious activity during recall. Out of the three models tested, ‘model 1’ recall quality was excellent across all conditions. ‘Model 2’ recall was the worst. The number of ‘active cells per pattern’ had a massive effect on network recall quality regardless of how many patterns were stored in it. As ‘active cells per pattern’ decreased, network’s memory capacity increased, interference effects between stored patterns decreased, and recall quality improved. Key finding was that increased firing rate of an inhibitory cell inhibiting a network of excitatory cells has a better success at removing spurious activity at the network level and improving recall quality than increasing the synaptic strength of the same inhibitory cell inhibiting the same network of excitatory cells, while keeping its firing rate fixed.
When asked about his experience, Nikolas said:
“I really enjoyed the conference and learned a lot. It was a valuable and absorbing experience for me. The atmosphere was friendly. I shared my research and my experience with other attendants, and exchange ideas which would help me to improve my existing work”.
Nikolas Andreakos is a PhD candidate at the University of Lincoln who is working on developing computational models of associative memory formation and recognition in the mammalian hippocampus.
Andreakos N., Yue S., Cutsuridis V. (2020) Improving Recall in an Associative Neural Network Model of the Hippocampus. In: Vouloutsi V., Mura A., Tauber F., Speck T., Prescott T.J., Verschure P.F.M.J. (eds) Biomimetic and Biohybrid Systems. Living Machines 2020. Lecture Notes in Computer Science, vol 12413. Springer, Cham. https://doi.org/10.1007/978-3-030-64313-3_1
ABOUT LIVING MACHINES 2020
The development of future real-world technologies will depend strongly on our understanding and harnessing of the principles underlying living systems and the flow of communication signals between living and artificial systems.
Biomimetics is the development of novel technologies through the distillation of principles from the study of biological systems. The investigation of biomimetic systems can serve two complementary goals. First, a suitably designed and configured biomimetic artefact can be used to test theories about the natural system of interest. Second, biomimetic technologies can provide useful, elegant and efficient solutions to unsolved challenges in science and engineering.
Biohybrid systems are formed by combining at least one biological component—an existing living system—and at least one artificial, newly-engineered component. By passing information in one or both directions, such a system forms a new hybrid bio-artificial entity. The theme of the conference also encompasses biomimetic methods for manufacture, repair and recycling inspired by natural processes such as reproduction, digestion, morphogenesis andmetamorphosis.
The following are some examples of “Living Machines” as featured at past conferences:
Biomimetic robots and their component technologies (sensors, actuators, processors) that can intelligently interact with their environments.
Biomimetic computers neuromimetic emulations of the physiological basis for intelligent behaviour.
Active biomimetic materials and structures that self-organise and self-repair or show other bio-inspired functions.
Nature inspired designs and manufacturing processes.
Biohybrid brain-machine interfaces and neural implants.
Artificial organs and body-parts including sensory organ-chip hybrids and intelligent prostheses.
Organism-level biohybrids such as robot-animal or robot-human systems.
The mammalian hippocampus is involved in auto-association and hetero-association of declarative memories. We employed a bio-inspired neural model of hippocampal CA1 region to systematically evaluate its mean recall quality against different number of stored patterns, overlaps and active cells per pattern. Model consisted of excitatory (pyramidal cells) and four types of inhibitory cells: axo-axonic, basket, bistratified, and oriens lacunosum-moleculare cells. Cells were simplified compartmental models with complex ion channel dynamics. Cells’ firing was timed to a theta oscillation paced by two distinct neuronal populations exhibiting highly regular bursting activity, one tightly coupled to the trough and the other to the peak of theta. During recall excitatory input to network excitatory cells provided context and timing information for retrieval of previously stored memory patterns. Dendritic inhibition acted as a non-specific global threshold machine that removed spurious activity during recall. Simulations showed recall quality improved when the network’s memory capacity increased as the number of active cells per pattern decreased. Furthermore, increased firing rate of a presynaptic inhibitory threshold machine inhibiting a network of postsynaptic excitatory cells has a better success at removing spurious activity at the network level and improving recall quality than increased synaptic efficacy of the same threshold machine on the same network of excitatory cells, while keeping its firing rate fixed.
Nikolas Andreakos attending the 9th international conference on biomimetic and biohybrid systems 2020
Fang Lei is a PhD Scholar at the University of Lincoln who is currently carrying out a 12 month ULTRACEPT secondment at project partner Guangzhou University, China. Fang is involved with Work Packages 1 & 2.
The WCCI is the world’s largest technical event on computational intelligence and features three conferences from the IEEE Computational Intelligence Society (CIS), the 2020 International Joint Conference on Neural Networks (IJCNN 2020), the 2020 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2020), and the 2020 IEEE Conference on Evolutionary Computation (IEEE CEC 2020).
IEEE WCCI 2020 covered topics in the field of neural networks, from biological networks to artificial computation and was attended by more than 2,350 record attendees from over 75 countries. The event schedule included:
Public lecture by Yoshua Bengio on the topic of artificial neural networks and deep learning 2.0
4 Plenary Speeches by world-renowned scholars: Barbara Hammer, Kay Chen Tan, Carlos Coello Coello, and Jim Bezdek
15 Keynotes by top-notch researchers, 5 per Conference
4 cutting-edge Panel sessions
36 Tutorials
10 Workshops
170 Special Sessions including 61 for IJCNN, 42 For IEEE CEC, 37 For FUZZ-IEEE, and 30 Cross-Disciplinary sessions
The LGMD1 neuron of locusts shows strong looming-sensitive property for both light and dark objects. Although a few LGMD1 models have been proposed, they are not reliable to inhibit the translating motion under certain conditions compare to the biological LGMD1 in the locust. To address this issue, we propose a bio-plausible model to enhance the collision-selectivity by inhibiting the translating motion. The proposed model contains three parts, the retina to lamina layer for receiving luminance change signals, the lamina to medulla layer for extracting motion cues via ON and OFF pathways separately, the medulla to lobula layer for eliminating translational excitation with neural competition. We tested the model by synthetic stimuli and real physical stimuli. The experimental results demonstrate that the proposed LGMD1 model has a strong preference for objects in direct collision course-it can detect looming objects in different conditions while completely ignoring translating objects.
When asked about her experience of the conference, Fang Lei said…
“Although I hoped to attend the conference physically, I was still excited as it was my first time attending the international conference. It started at midnight in China due to the time difference but I was eager to share my research with academic peers and share this experience with them.
I was asked to present at the conference and did so via a pre-uploaded video. I presented within the visual system session of IJCNN regular sessions. The presentation went very smoothly and we discussed problems with presenting papers by asking and answering questions.
I found the conference to be an interesting and meaningful experience for me. It was good to be able to spread our work to peers and gain knowledge of the work others are doing. The only thing I wish was that the conference was face-to-face.”
University of Lincoln researcher Hamid Isakhani returned to China to continue his ULTRACEPT secondment at Huazhong University of Science and Technology in June of 2020. Due to the unprecedented Covid situation, Hamid was required to quarantine for 14 days in the Guangu Hotel. During this time, he virtually attended the Ubiquitous Robots (UR) 2020 Conference held in Kyoto, Japan.
Like many recent conferences, this was UR’s first ever virtual event. Organised by the Korea Robotics Society and co-sponsored by the IEEE Robotics and Automation Society, UR2020 brought together scientists and engineers across the world who are at the forefront of robotics and automation. The week-long conference held 22-26 June 2020 comprised a variety of Keynote speeches, workshops and break-out sessions. To read more about the conference you can visit the Ubiquitous Robots 2020 website, here.
This paper was nominated for the URA 2020 Best Paper Award.
Here is what Hamid had to say about the experience:
“2020 has been no ordinary from day one. Plane crashes, earth quakes, forest fires and now the devastating pandemic has certainly changed all of our lives for good or bad (reader’s perception). What is important is that we learn, adapt, and live on. Although some of our decisions are better than the others; like the AERO 2020 conference in France being postponed by over a year due to the pandemic compelling us to withdraw our participation, KROS on the other hand decided to take the leap and conduct the 17th International Conference on Ubiquitous Robots (UR2020) in Kyoto, Japan on the originally scheduled dates virtually for the first time in its history. It was certainly challenging for both the organisers as well as the participants, yet it was a success with a lot of takeaways for everyone.
Although the core topic of our work is more related to the field of Aerospace, we were extremely pleased to learn that our work was greatly recognised by the robotics community and nominated for the best contributed paper award at UR2020.
On 25th June 2020, 09:00hrs (JST), our 10 minutes long pre-recorded presentation was played back on Zoom application for the audience who later raised their questions via the built-in Q&A tab provided on the platform. Participants had access to the audio and video of the presenter and the session Chair who communicated and sorted the posted questions through a one-on-one video call.
Online conference sceptics might argue that networking and physical meetings at an international conference is a significant advantage missing in a virtual event, especially for early career researchers. Fortunately, this feature was also thoughtfully integrated by the organisers on the Slack application where different channels were created for presenters to communicate and share opinions/contacts for a period of thirty days.
Overall, it was rather an interesting experience, although I was in my 14-days covid-19 quarantine in China, at least I didn’t have to attend my session past midnight in the UK (BST).”
Hamid remains in China to carry on his secondment activities, although not in quarantine anymore. He continues his study on the effects of haemolymph on the flexural stiffness of various flying insect species. You can learn more about Hamid’s research here.
Ultra-layered perception with brain-inspired information processing for vehicle collision avoidance